


ANDRZEJ KOKOSZA
Opis projektu instalacji kinetycznej pt. „RZEŹBA DLA RZEŹBIARKI”
Od zawsze fascynowałem się zagadnieniami z pogranicza inżynierii i sztuki. Skupiłem się w swojej twórczości na rzeźbie kinetycznej i instalacjach mobilnych. W swoich pracach zestawiam dwa światy: industrialną technologiczną formę z podmiotem i jego obrazem, któremu nadaję nadrzędną rolę.
Niezależnie od stopnia złożoności technicznej, samodzielnie projektuję i realizuję wszystkie swoje prace.
Postanowiłem w swoich działaniach pójść znacznie dalej w wymiarze zaangażowania społecznego. Pomysł który od pewnego czasu pochłonął mnie bez reszty, jest ingerencją w naprawdę osobisty obszar życia drugiej osoby. Odwagę do jego zrealizowania daje mi przekonanie o jego społecznym humanistycznym i międzyludzkim wymiarze.
Podjąłem się stworzenia instalacji kinetycznej której nadałem tytuł „rzeźba dla rzeźbiarki”.
Pod tym na pierwszy rzut oka, niewiele znaczącym sformułowaniem kryje się osobista historia, studentki rzeźby Anny Tosiek, która w wyniku nieszczęśliwego wypadku, straciła ramię i nie poddając się temu osobistemu dramatowi dalej pracuje nad swoim rozwojem artystycznym.Jako twórca rzeźby kinetycznej, chcę jej ofiarować swoją pracę, która jak ufam mogła by jej ułatwić i wesprzeć w jej suwerennych działaniach w obszarze kreacji rzeźbiarskich.
Powstanie swoistej pętli zdarzeń artystycznych i społecznych relacji, jest dla mnie niezwykle ważną ideą. Świadomość delikatności
i złożoności tej sytuacji wymusiła na mnie staranne przeanalizowanie czy w istocie podołam tak skomplikowanemu przedsięwzięciu.
Po złożeniu takiego zobowiązania nie ma odwrotu.
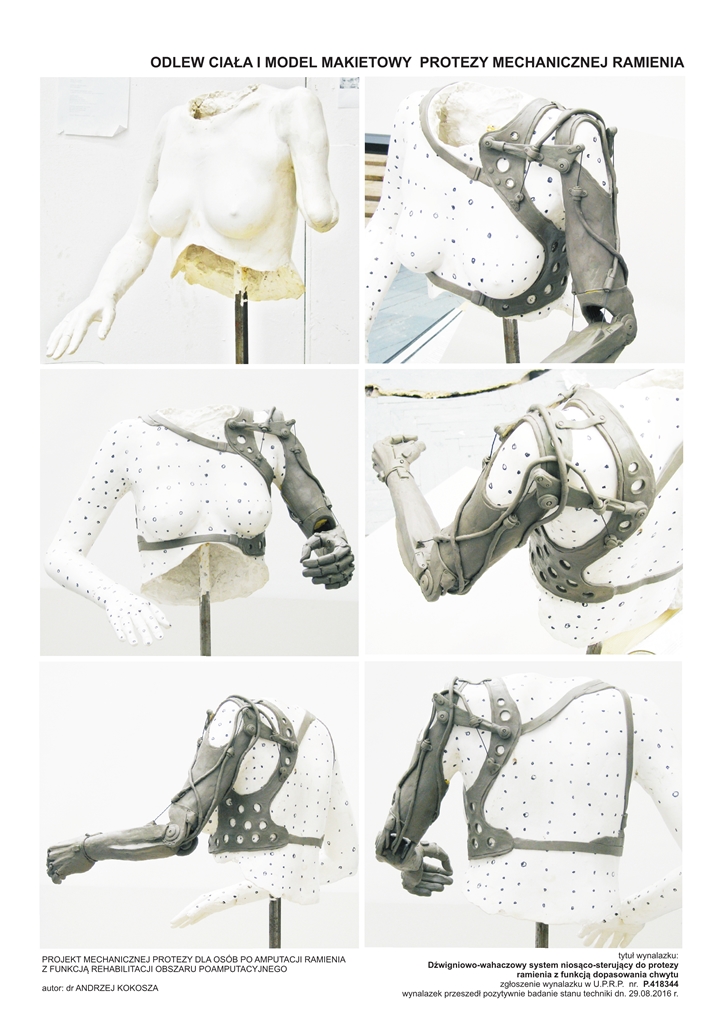
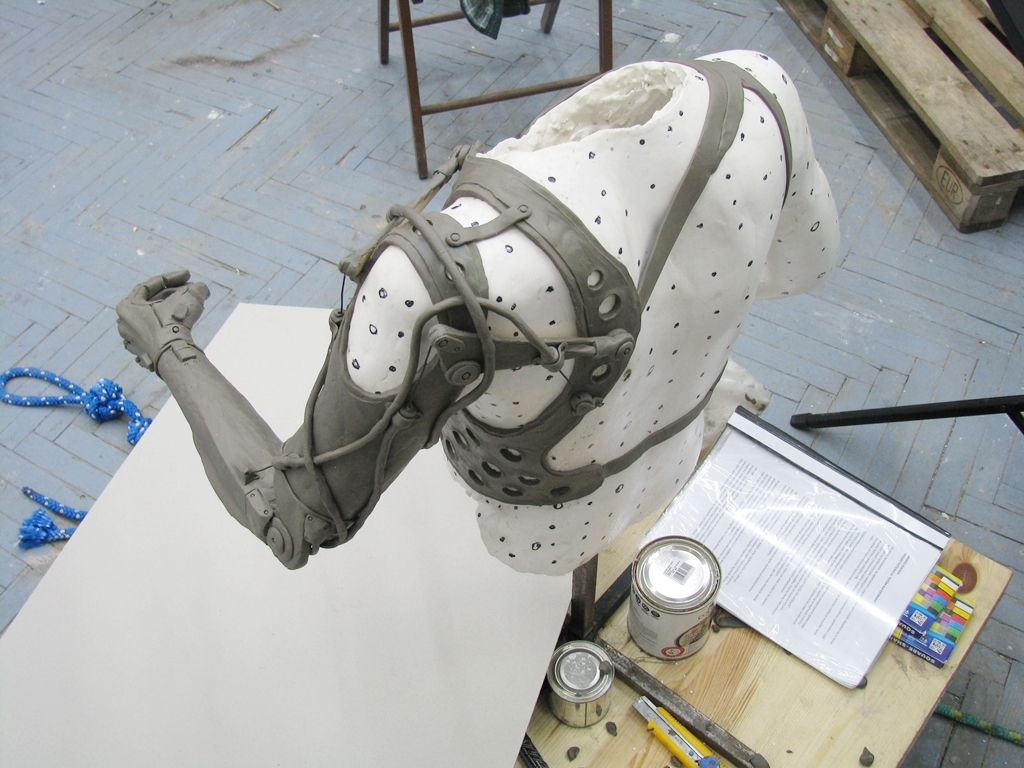
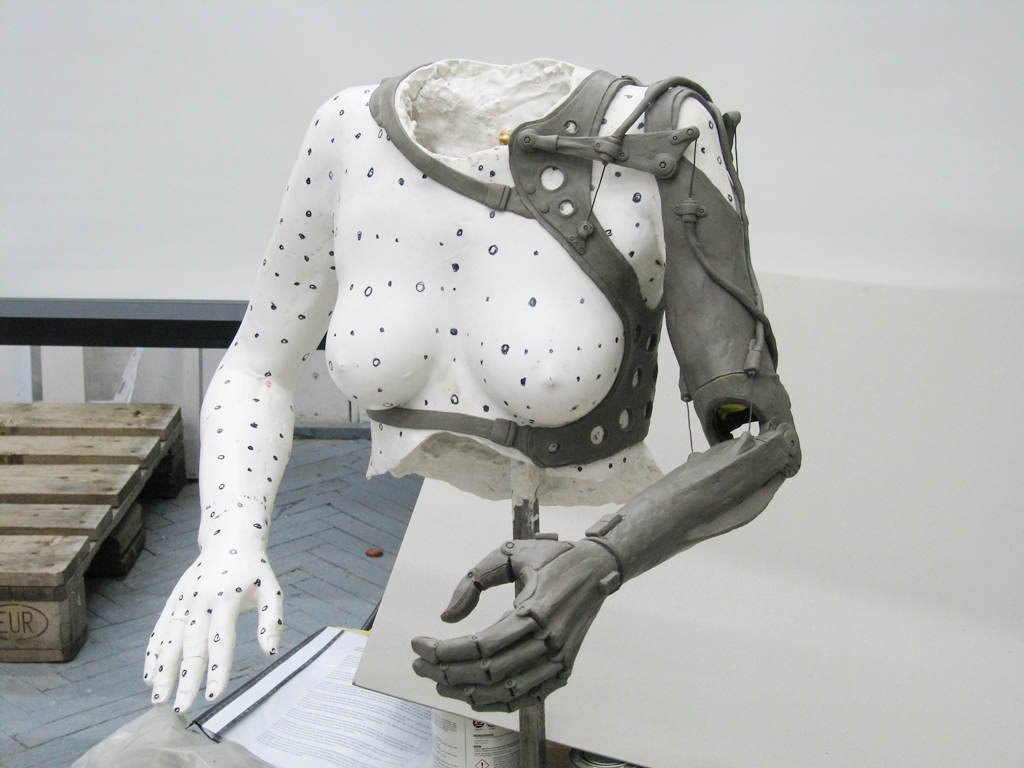
Ogromną wagę będę przywiązywał w tym projekcie do relacji z Anią i zaufania jakie mi okazuje uczestnicząc w tym przedsięwzięciu. Istotą jest jej podmiotowa rola i współuczestnictwo z jej strony. Dużym wsparciem dla mnie jest postawa jej przyjaciółki [również studentki rzeźby] Agnieszki Bielak, która zrealizowała wspólnie z Anną odlew z jej ciała.
Prześledziłem rozwiązania stosowane w konwencjonalnej ortopedii i doszedłem do wniosków, że proponowane obecnie powszechne rozwiązania nie mogą spełnić potrzeb w pracy rzeźbiarki, nie wspominając o zachowaniu wdzięku formy kobiecego ramienia.
Moją ideą jest stworzenie obiektu na nowo definiującego formę i funkcję obiektu dopełniającego ciało w wymiarze estetycznym i funkcjonalnym. Zdecydowałem się na całkowite wyeliminowanie elementów elektrycznych i elektronicznych.
Skupiając się na takich rozwiązaniach mechaniczno – automatycznych i materiałowych jak: kompozyt węglowy, stopy lekkie, które pozwolą stworzyć obiekt typu G-shock, który można po ubrudzeniu gliną umyć strumieniem wody, czy wejść pod prysznic, niezależny od źródeł zasilania, sterowany ruchami obojczyka i górnej części ramienia.
Forma – Ostatecznym celem jest stworzenie instalacji, która mogła by towarzyszyć w jej codziennym życiu, którą mogła by animować odnosząc z tego korzyść.
Całość instalacji chcę tak skomponować by w żaden sposób nie dominowała nad jej ciałem a je dopełniała.
Mimo mechanicznego charakteru musi być w niej zachowany wdzięk kobiecego ciała i gestu. Chcę zrezygnować z powlekania jej substytutami skóry.
Ma nie udawać czegoś czym nie jest.
Dzięki dbałości o estetykę i kształt detalu w zsyntetyzowanej formie obiekt będzie mógł zapewnić komfort w wymiarze fizycznym i psychicznym.
Funkcja-Zdecydowałem się rozwiązać na zupełnie innej zasadzie niż w konwencjonalnej ortopedii poruszanie dłonią oraz zginanie ramienia
w łokciu.
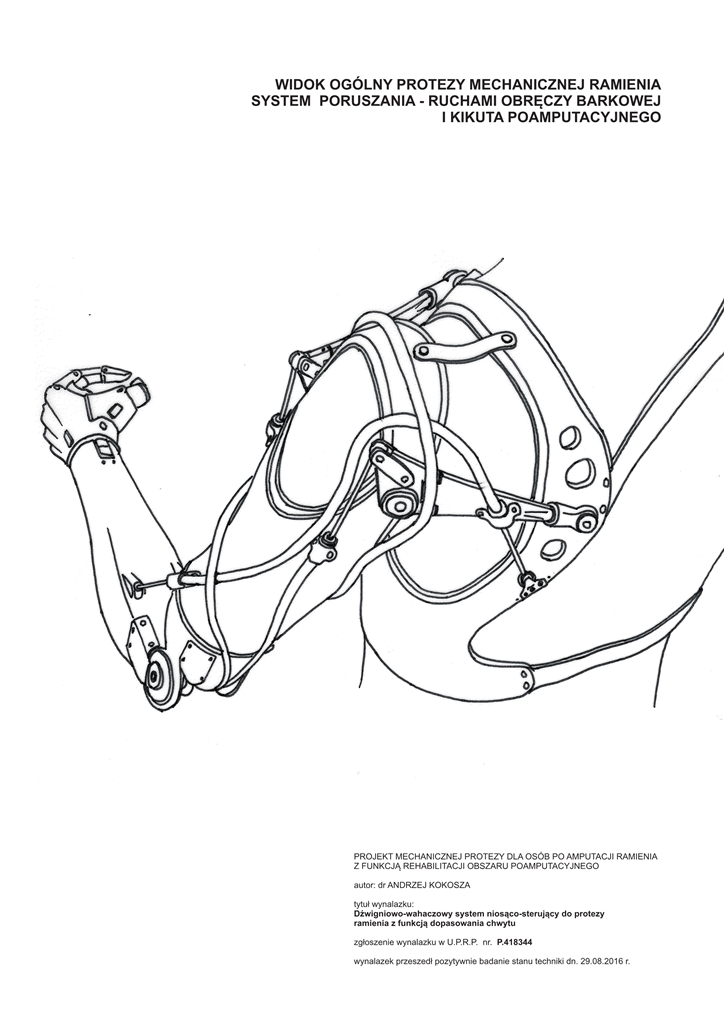
Całość sterowania zamierzam zrealizować systemem wahaczy z cięgłami zlokalizowanymi w okolicy obojczyka i łopatki.System ten wahliwie spinałby szczątkowy gorset z włókna węglowego, zlokalizowany na boku klatki piersiowej z częścią ramienną na wysokości obręczy barkowej, nie ograniczając ruchomości stawu mostkowo obojczykowego.
Opracowałem taką metodę mechanicznego poruszania dłonią by pałce dopasowywały się do każdego kształtu, dzięki współzależnemu układowi umieszczonemu w przedramieniu.
Ponadto to rozwiązanie biorąc energię do zamykania dłoni z przybliżania ramienia do klatki piersiowej, będzie generować znacznie silniejszy chwyt dłoni niż w konwencjonalnych rozwiązaniach.
Podsumowując, uniesienie obojczyka będzie inicjować zgięcie łokcia z możliwością blokowania, natomiast odsunięcie ramienia od ciała otwierać dłoń a przybliżanie, stopniowo ją zamykać.
Ta dłoń będzie mogła być też ustawiana w kilku pozycjach względem wzdłużnej osi ramienia.
Tak rozległy obszar działań artystyczno-projektowych, będzie się wiązał ze współpracą ze specjalistami w dziedzinie materiałoznawstwa, druku 3d, korzystania ze specjalistycznego zaplecza technicznego, jak również z zabezpieczenia prawnego wprowadzonych rozwiązań technicznych. Możliwie dużo aspektów technicznych będę rozwiązywał sam by w istocie była to moja kreacja rzeźbiarska.
Nieodzowne będzie tworzenie wielu serii prototypowych wprowadzanych rozwiązań technicznych oraz tworzenia dokumentacji.
Całość tego przedsięwzięcia planuję dokumentować w aspekcie interakcji społecznej i oddźwięku jaki wywoła jego prowadzenie tj: współdziałania z Anią jako kluczową uczestniczką, współpracy z innymi osobami i instytucjami.
Powodzenie mojego przedsięwzięcia będzie mogło być nowym otwarciem do podobnych działań.
Jest to obecnie robocza wersja założeń całego projektu i mam świadomość zasygnalizowania jedynie wąskiego obszaru aspektów jakich on dotyka.
Będę poszukiwał nowych płaszczyzn i obszarów oddziaływania tego projektu.
Będę poszukiwał źródeł finansowania by go urzeczywistnić w jak najdoskonalszej formie.
Podczas realizacji projektu i rozlicznych konsultacji, również z prawnikami, nieodzowne okazało się zabezpieczenie projektu od strony prawnej. W związku z tym oczywistą koniecznością stało się uzyskanie ochrony patentowej. Proces ten okazał się bardzo skomplikowany w kontekście polskich przepisów patentowych które obligują do spełnienia rozlicznych wymogów formalno-prawnych zwłaszcza że mój projekt i całość wynalazku tj.: tak skomplikowanego urządzenia protetycznego będącego jednocześnie urządzeniem rehabilitacyjnym w naturalny sposób został zakwalifikowany jako wynalazek medyczny.
Na obecnym etapie udało mi się dokonać zgłoszenia patentowego oraz przejść pozytywnie fundamentalny etap w przypadku zgłoszeń wynalazków tj.: uzyskać pozytywny wynik badania nowości i wynalazczości mojego rozwiązania – Urząd Patentowy UPRP (numer P.418344 z dnia 29.08.2016 – Dźwigniowo-wahaczowy system niosąco-sterujący do protezy ramienia z funkcją dopasowania chwytu).
Ze względu na obostrzenia formalne związane ze zgłoszeniem patentowym, nie mogłem dotychczas rozpocząć budowania modeli we współpracy z żadną instytucją ani podmiotem gospodarczym, ponieważ pociągało to ryzyko ujawnienia części lub całości projektu co uniemożliwiło by mi dokonanie zgłoszenia wynalazku w świetle prawa. Dopiero na tym etapie mogę dokonać fizycznej realizacji projektu.
Od tego momentu mogę rozpocząć realizację projektu dzieląc go na trzy fundamentalne obszary:
- Opracowana na obecnym etapie, strona inżynieryjna – sposób działania, mechanika –
- Strona artystyczna – we współpracy z ASP w Warszawie – aspekt społeczno-artystyczny przedsięwzięcia, ergonomia i zaawansowany design.
- Współpraca z instytucją typu Wydział Medycyny Ministerstwa MON w celu uzyskania certyfikacji medycznej.
dr Andrzej Kokosza
PROJEKT MECHANICZNEJ PROTEZY DLA OSÓB PO AMPUTACJI RAMIENIA
Z FUNKCJĄ REHABILITACJI OBSZARU POAMPUTACYJNEGO
autor: dr ANDRZEJ KOKOSZA
tytuł wynalazku:
DŹWIGNIOWO-WAHACZOWY SYSTEM NIOSĄCO – STERUJĄCY DO PROTEZY RAMIENIA Z FUNKCJĄ DOPASOWANIA CHWYTU
zgłoszenie wynalazku w U.P.R.P. nr: P.418344
wynalazek przeszedł pozytywnie badanie stanu techniki: nowości i wynalazczości dn. 29.08.2016 r.
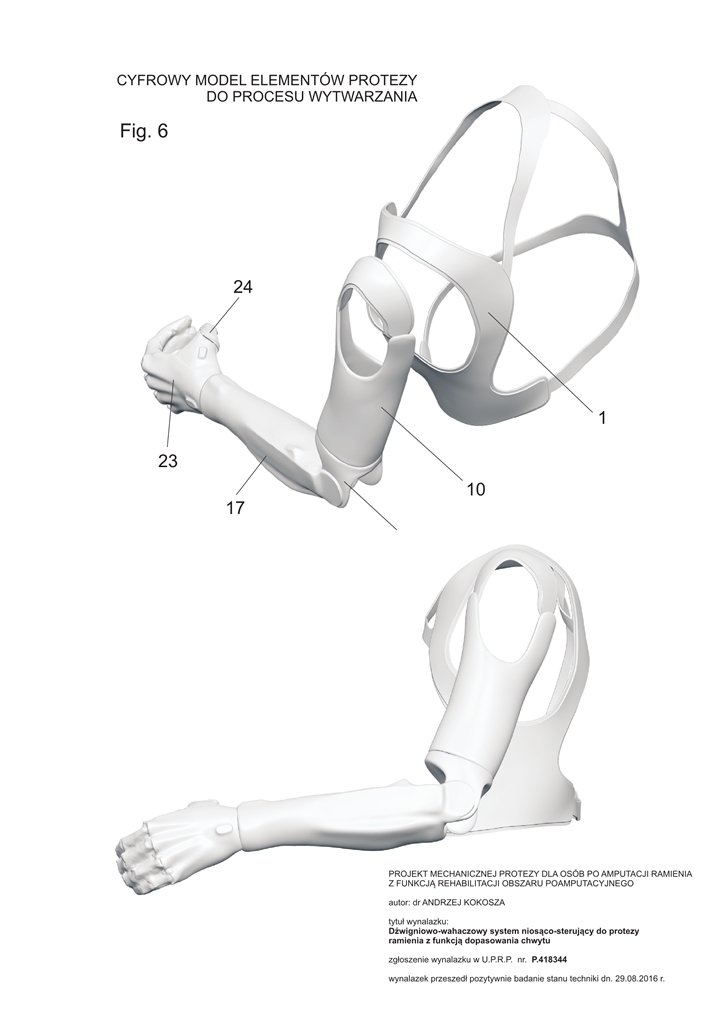
SKRÓCONY OPIS
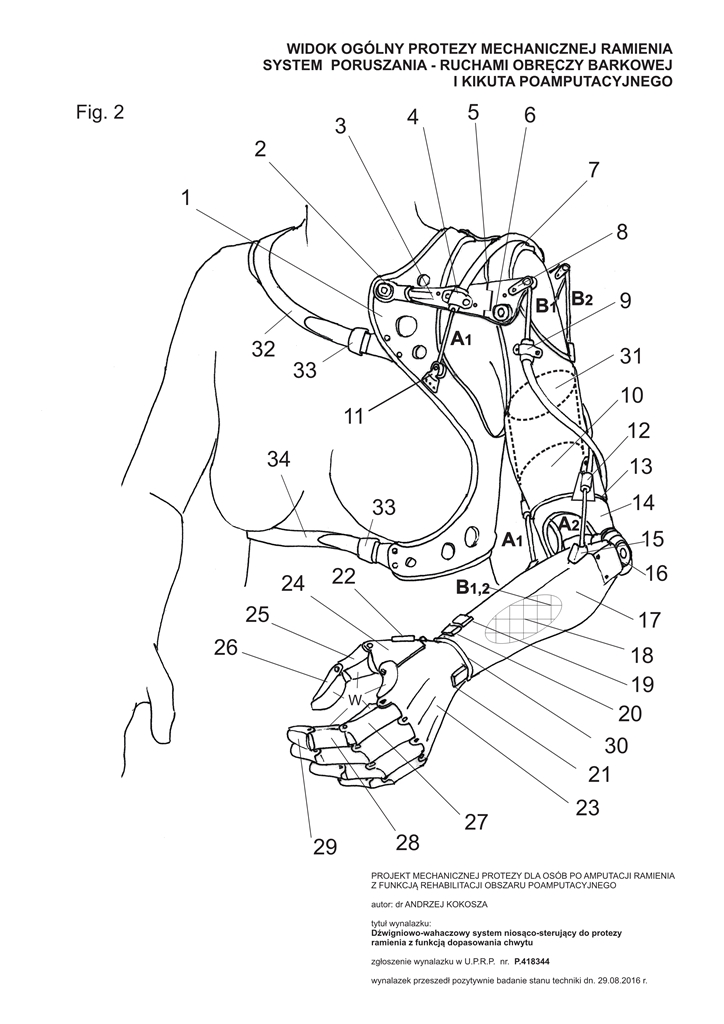
Wynalazkiem jest system dźwigniowo – wahaczowy, niosąco – sterujący, z funkcją chwytu dopasowującego się do kształtu chwytanego obiektu w protezie dla osób po amputacji ręki powyżej stawu łokciowego.
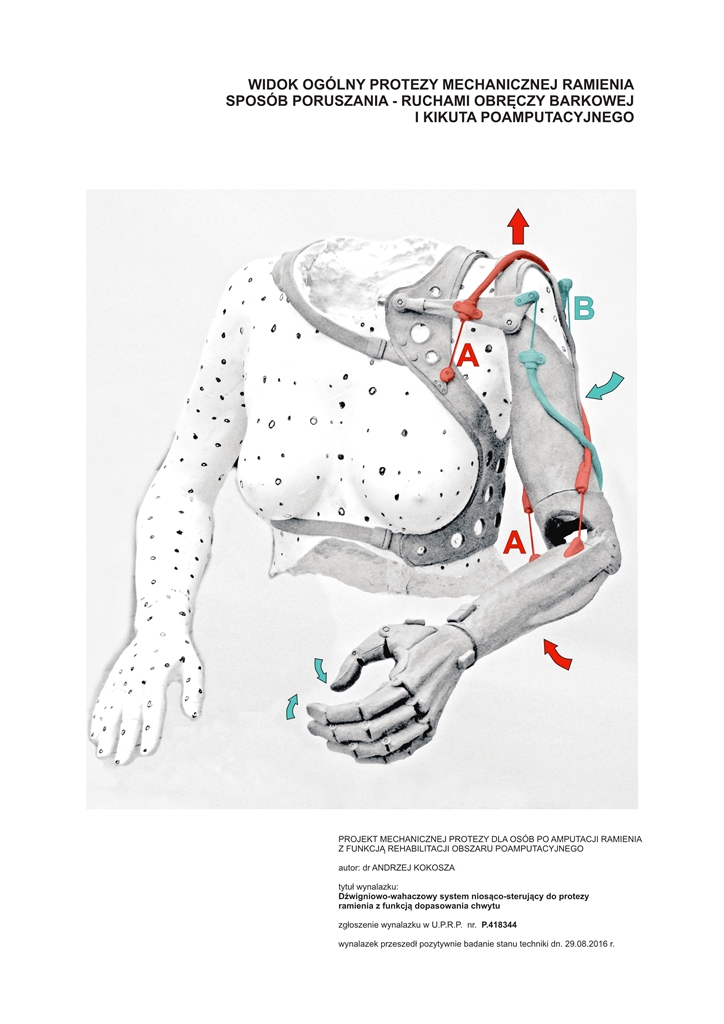
Aby poruszać protezą niezbędne są ruchy obręczy barkowej i kikuta co sprzyja rehabilitacji tego obszaru, ponadto uruchamiane dzięki takim ruchom ciała, dźwignie – wahacze, podparte
o szczątkowy gorset zapewniają prowadzenie i stabilizację ramienia protezy. Poruszanie tymi wahaczami – dźwigniami, poprzez podnoszenie i opuszczanie barku powoduje wprawianie
w ruch cięgieł, które zapewniają zginanie łokcia, natomiast odwodzenie i przywodzenie kikuta
w protezie do ciała, powoduje poprzez system bloczków i dźwigni dwustronnych, otwieranie
i zamykanie palców chwytaka (Fig. 2)
System wahaczy zapewniający prowadzenie części ramieniowej protezy z wymienną, pierścieniową wkładką nie obejmującą krawędzi poamputacyjnej, pozwala zrezygnować z leja podciśnieniowego stosowanego konwencjonalnych rozwiązaniach (Fig. 2, nr 1-9, 11, 31) który w dłuższym użytkowaniu powoduje znaczny dyskomfort co potwierdza wywiad wśród osób używających konwencjonalnego leja.
Proponowane przeze mnie rozwiązanie pozwala na wcześniejsze rozpoczęcie użytkowania protezy
a tym samym rehabilitację obszaru poamputacujnego co zapobiega zanikom mięśni obszaru obręczy barkowej, a w konsekwencji zapobiega negatywnemu oddziaływaniu tego typu urazu na kręgosłup.
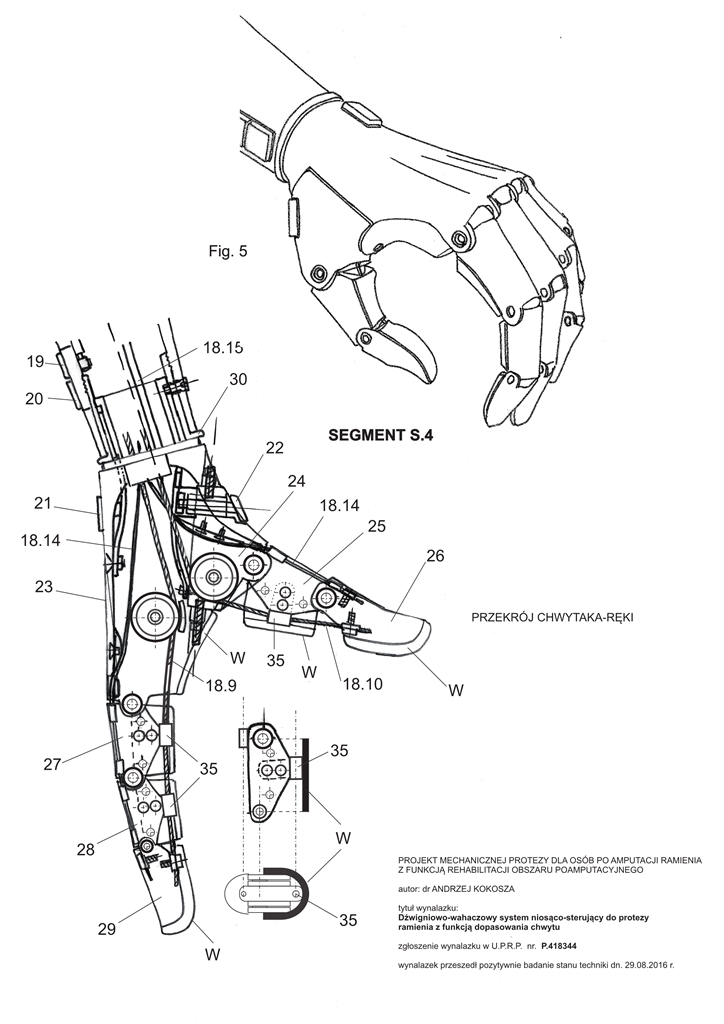
W części przedramienia znajduje się mechanizm, oparty na zasadzie zespołu dźwigni dwustronnych (Fig. 4, nr 18.01 – 18.14), gdzie dźwignie te są połączone w piętrowy system tzn.: do końców podpartej po środku przez cięgło, dźwigni dwustronnej, zaczepione są poprzez cięgła następne dwa zespoły dźwigni dwustronnych, od których końców odchodzą cięgła do czterech palców chwytaka protezy a kciuk chwytaka jest połączony bezpośrednio z cięgłem centralnym. Rozwiązanie takie zapewnia dopasowanie pozycji palców chwytaka dłoni do kształtu chwytanego obiektu oraz umożliwia kontrolę nad stopniem i siłą zamknięcia palców chwytaka.
Całość urządzenia ze względu na analogowy system napędu oraz na zastosowane materiały jest wodoodpornym urządzeniem typu g-shock. Operowanie obręczą barkową i kikutem umożliwia jednoczesne poruszanie zginaczem części łokciowej protezy i chwytakiem – dłonią z zachowaniem pełnej koordynacji ruchów.
dr ANDRZEJ KOKOSZA
OPIS PROJEKTU Z PERSPEKTYWY ANNY TOSIEK
Nazywam się Anna Tosiek i jestem studentką Akademii Sztuk Pięknych w Warszawie, na Wydziale Rzeźby. Dwa lata temu uległam wypadkowi w wyniku którego straciłam lewą rękę. Dzięki pomocy przyjaciół, udało mi się zakupić protezę, która umożliwia mi głównie prace dłutami, takie jak rzeźbienie w drewnie czy okuwanie gipsowej formy przy odlewaniu rzeźby. Jednak nie jest ona na tyle wygodna i funkcjonalna by nosić ją na co dzień i używać do każdej pracy jaką wykonuję w domu i na uczelni. Jest to przykład standardowego rozwiązania mechanicznej protezy kończyny górnej. Dostępne są oczywiście znacznie bardziej, technologicznie zaawansowane protezy bioniczne. Nie są one jednak odpowiednie do rodzaju prac, jakie wykonuję, z racji na zbyt delikatny i podatny na uszkodzenia, system elektroniczny który posiadają. Są również o wiele droższe.
Stwierdziłam ostatecznie że nie mam możliwości posiadania protezy która byłaby na tyle wygodna i na tyle odpowiadałaby moim potrzebom, abym mogła z powodzeniem używać jej na co dzień i angażować ją w swoją prace twórczą. Jest to jeden z powodów dla których jestem pod ogromnym wrażeniem projektu „Rzeźba dla rzeźbiarki”. Jego realizacja może stać się przełomowym momentem w moim życiu i w mojej twórczości. Rozwiązania które opracował Andrzej Kokosza, przekonują mnie, że instalacja którą chce mi podarować, ma ogromną szanse stać się integralną częścią mojego ciała, towarzyszącą mi codziennie, która ułatwi mi wszystkie codzienne czynności. Przede wszystkim jednak, ułatwi i usprawni mi pracę nad moimi własnymi realizacjami rzeźbiarskimi.
Nastąpi wówczas sytuacja szczególna, w której, instalacja kinetyczna, wykreowana przez artystę, będzie spełniać ważną rolę, zarówno w życiu codziennym jak i twórczym, drugiej osoby. Zaangażowanie społeczne, wprowadzenie innowacyjnych rozwiązań oraz szlachetność celu, składają się tutaj, na wyjątkowe działanie artystyczne. Bardzo doceniam je w każdym jego aspekcie i czuję się wyróżniona mogąc w nim uczestniczyć. Będzie to dla mnie bardzo cenne i inspirujące doświadczenie.
Satysfakcjonujące jest dla mnie to że moja rola jako osoby również zajmującej się sztuką, ma duże znaczenie dla samej idei tego projektu, oraz to, że w pewnym stopniu, sama go współtworzę.
Budująca jest dla mnie również świadomość, że projekt ten, ze względu na innowacyjne rozwiązania, ma ogromną szanse wpłynąć pozytywnie na jakość życia wielu ludzi dotkniętych amputacją kończyn górnych.
Nowe mechanizmy które zaproponował Andrzej, eliminują wszystko co, moim zdaniem, stwarza problemy w używaniu standardowej, mechanicznej protezy. Innowacyjność ta, w dużym skrócie, polega na zwiększeniu funkcji ruchomych protezy oraz komfortu jej noszenia. Aby bardziej przybliżyć jej istotę, przedstawiam tutaj korzyści które wynikną z nowych rozwiązań, opierając się na tym co utrudnia mi w korzystanie z mojej obecnej protezy:
Zabudowanie znacznej części barku przez zamknięty lej protezowy w którym umieszczony jest kikut, ogranicza możliwość swobodnego poruszania nim. Duży problem stanowi też samo zakładanie protezy które polega na wpychaniu i zasysaniu kikuta w leju. Zabiera to wiele czasu i wymaga użycia dużej siły.
Rozwiązaniem będzie możliwość zakładania protezy od boku, przy pomocy dwóch części zamykających się na kikucie, z możliwością regulacji ich zacisku. Dzięki temu zakładanie będzie o wiele szybsze i wygodniejsze. Ponieważ zacisk nie będzie zabudowywał barku, wykorzystanie większego zakresu ruchu będzie swobodniejsze, a skóra będzie mogła oddychać.
Duży dyskomfort przy noszeniu mojej obecnej protezy, sprawiają mi szelki które dodatkowo mocują protezę. Od ich zaciśnięcia na ciele zależny jest również ruch otwierania dłoni. Szelki krzyżują się na plecach, a jeden z pasków przebiega pod prawą ręką co powoduje w tym miejscu duży ucisk.
Rozwiązaniem będzie rozprowadzenie tego ciężaru na szerszą część klatki piersiowej i pleców przy stworzeniu częściowego gorsetu z paskami pod biustem i na plecach. Znacznie zwiększy to komfort samego noszenia protezy.
W stosowanych obecnie protezach, istnieje możliwość wymiany końcówek-dłoni. Można jednak, wygenerować nimi, tylko jeden typ ruchu. W końcówce imitującej dłoń, jest to ruch kciuka który zaciska się do palca wskazującego. Przy takim ruchu nie jestem w stanie łapać większości przedmiotów. Każda z końcówek jest dostosowana do niewielu kształtów. Głównie sprawdzają się w przytrzymywaniu niewielkich przedmiotów. W porównaniu więc z możliwościami prawdziwej dłoni, spełniają bardzo wąski zakres jej możliwości. Samo odciągnięcie kciuka wymaga mocnego ściągnięcia barków. Taki ruch wygląda mało naturalnie i nie jest adekwatny do sytuacji.
Nowy mechanizm tego właśnie ruchu i propozycja całkiem inaczej zbudowanej dłoni, są kluczowymi rozwiązaniami które stanowią o przewadze tego projektu nad standardowym rozwiązaniem. Sposób w jaki ma działać ruch zamykania dłoni będzie bardziej odpowiadał naturalnym gestom prawdziwej ręki. Dłoń będzie zaciskać się wszystkimi palcami, przy przywodzeniu ręki do ciała, dopasowując się do kształtu jaki łapie. W ten sposób, możliwe będzie trzymanie wielu różnych przedmiotów, bez obawy o ich wyślizgnięcie się. Ruch zaciskania, wygenerowany przez przywodzenie ręki będzie płynniejszy i bardziej naturalny, szczególnie przy sięganiu po jakiś przedmiot.
W standardowym rozwiązaniu, poprzez ruch barku, uzyskuje się kontrole jedynie nad blokowaniem i odblokowywaniem łokcia w danej pozycji. Tą natomiast trzeba ustawić ręcznie lub zarzucić rękę do góry i zablokować ją w wybranej pozycji, kiedy opada, co jest mało poręczne. Ogranicza to używanie protezy o momenty, kiedy zajętą mam prawą rękę.
Możliwość uniesienia ręki, przez uniesienie barku do góry, znacznie to usprawni. Będzie można swobodnie ją animować i ustawić w dowolnej pozycji, niezależnie od tego, czy zajęta jest druga ręka. Przy tym, będzie ją można zablokować w każdej pozycji.
Część rozwiązań które chce zastosować Andrzej, wynika z naszych rozmów na ten temat, pewnych moich sugestii, które są dla niego szczególnie ważne. Projekt tej instalacji jednak jest tak dopracowany pod względem swojej użyteczności, że jestem w stanie bardzo niewiele powiedzieć na temat tego, jakich jeszcze funkcji można by było od niej oczekiwać.
http://magazynszum.pl/rozmowy/obiekt-prosty-i-solidny-rozmowa-z-andrzejem-kokosza